 En observant les millions de termites qui travaillent en équipe ou plutôt en stigmergie pour construire leur termitière (édifice qui peut atteindre 6 à 8 mètres de haut) une équipe de chercheur d’Harvard a modélisé le comportement de ces termites afin de l’appliquer à des petits robots constructeurs.
En observant les millions de termites qui travaillent en équipe ou plutôt en stigmergie pour construire leur termitière (édifice qui peut atteindre 6 à 8 mètres de haut) une équipe de chercheur d’Harvard a modélisé le comportement de ces termites afin de l’appliquer à des petits robots constructeurs.
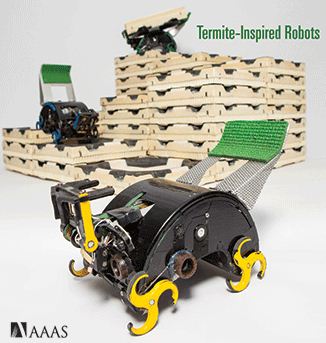
Les développeurs en s’inspirant de cette stigmergie ont donc conçu un logiciel qui permet à ces petits robots de travailler en équipe sans contrôle central, guidé par des règles basiques, ils ne perçoivent que les briques et autres robots dans leur voisinage immédiat, et utilisent des règles simples telles que avancer, reculer, tourner, grimper et porter des briques, les empiler. Chaque robot travail de manière indépendante et sans plan.
L’idée d’essaim de petits robots bon marché fonctionnant indépendamment offrent des avantages par rapport aux autres systèmes de robot, car plusieurs robots contrôlés par une source centrale peut être difficile à gérer, le nombre augmentant pouvant submerger un co-ordinateur central, de plus les robots peuvent également continuer à travailler si un ou plusieurs individus se mettant en défaut ou en grève… :o)